協働ロボットグリッパー - ISCインナーソフトクランプコボットアームグリッパー



メインカテゴリー
産業用ロボットアーム / 協働ロボットアーム / 電動グリッパー / インテリジェントアクチュエーター / 自動化ソリューション / 協働ロボットアームグリッパー / ソフトグリッパー / ロボットアームグリッパー
応用

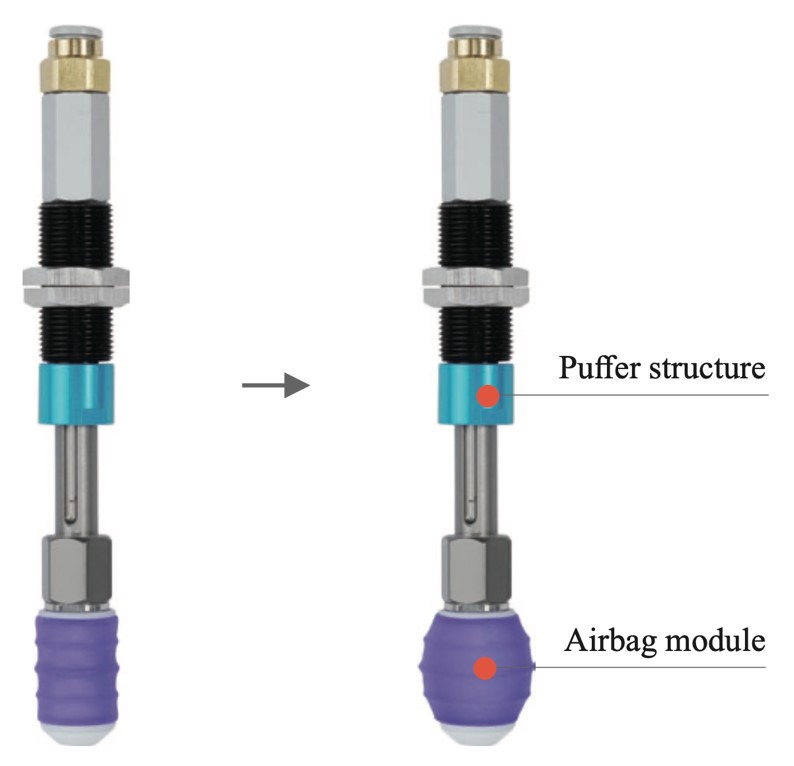
ISC内部支持クランプは、フグの自己防衛形態を模倣した革新的なソフトフィクスチャーです。圧力によって空気を膨らませることで、フィクスチャーが拡張し、内部支持の把持を完了します。
ワークとの接触部は柔らかいシリコンゴム製であるため、圧力を加えると、剛性支持部と接触面の間に「エアクッション」層が形成され、応力が均一になり、ワークへの損傷を防ぎます。さらに、入力空気圧を調整することでエアバッグの伸長とワークとの接触応力を制御できるため、把持システムの柔軟性が大幅に向上します。
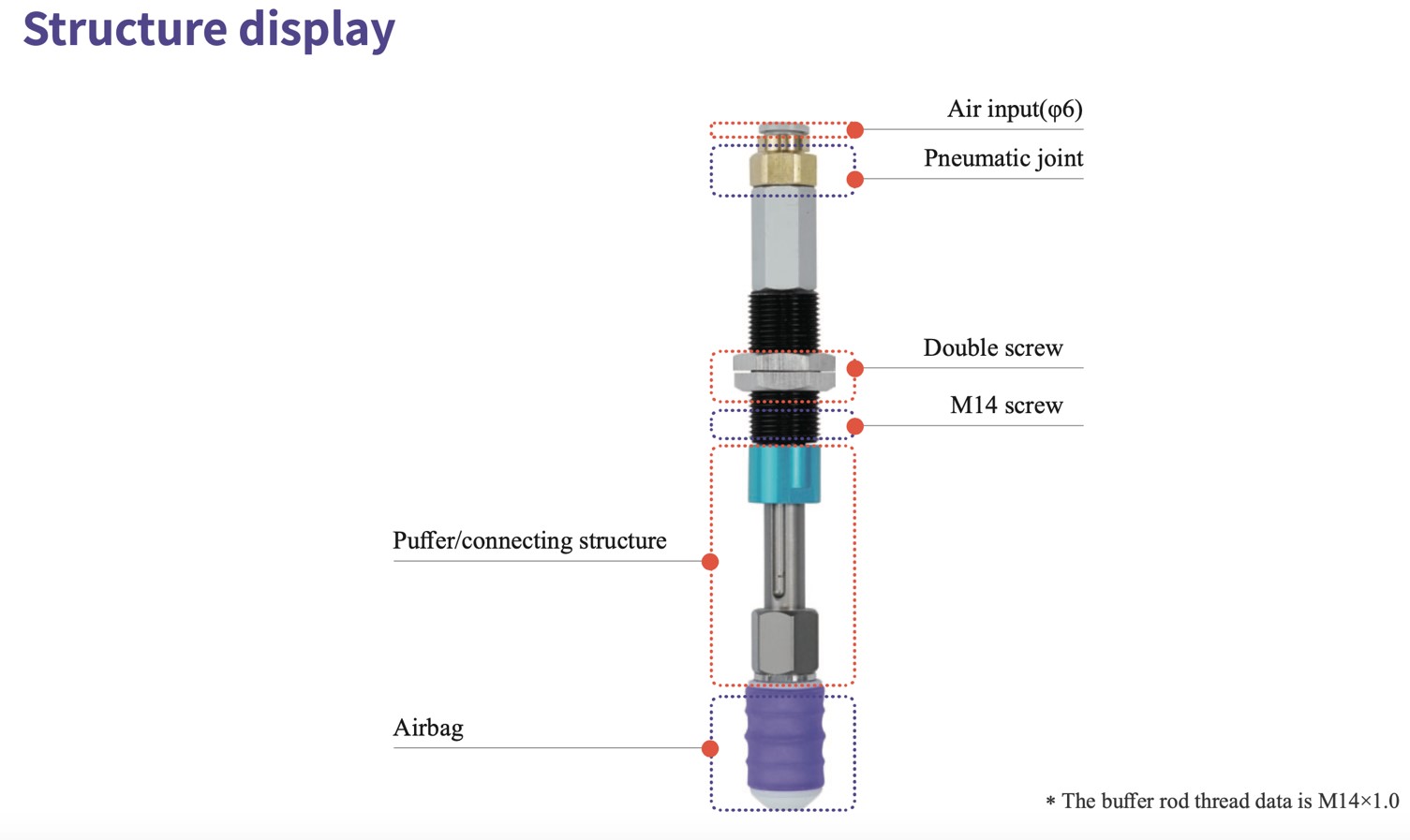
特徴

·駆動媒体:クリーンエア
·標準使用寿命:10万回以上
·最大動作周波数(cpm):300
●内部支持クランプは特殊なエアバッグ構造になっており、内部圧力に応じて異なる変形を生み出すことができます。
● 正圧を入力すると、フィクスチャーが伸びて、物体の内面を自己適応的に支持し、把持を完了します。
● 負圧を入力すると、治具が自然な状態になり、物体が解放されます。
SFG ソフトグリッパーは、次のような世界クラスの協働ロボットアームに導入されています。

横型4軸(スカラ)ロボット デルタ
産業用ロボットアーム 不二越那智
4軸パラレル(デルタ)ロボット ABB
6軸協働ロボット UR
6軸協働ロボット AUBO



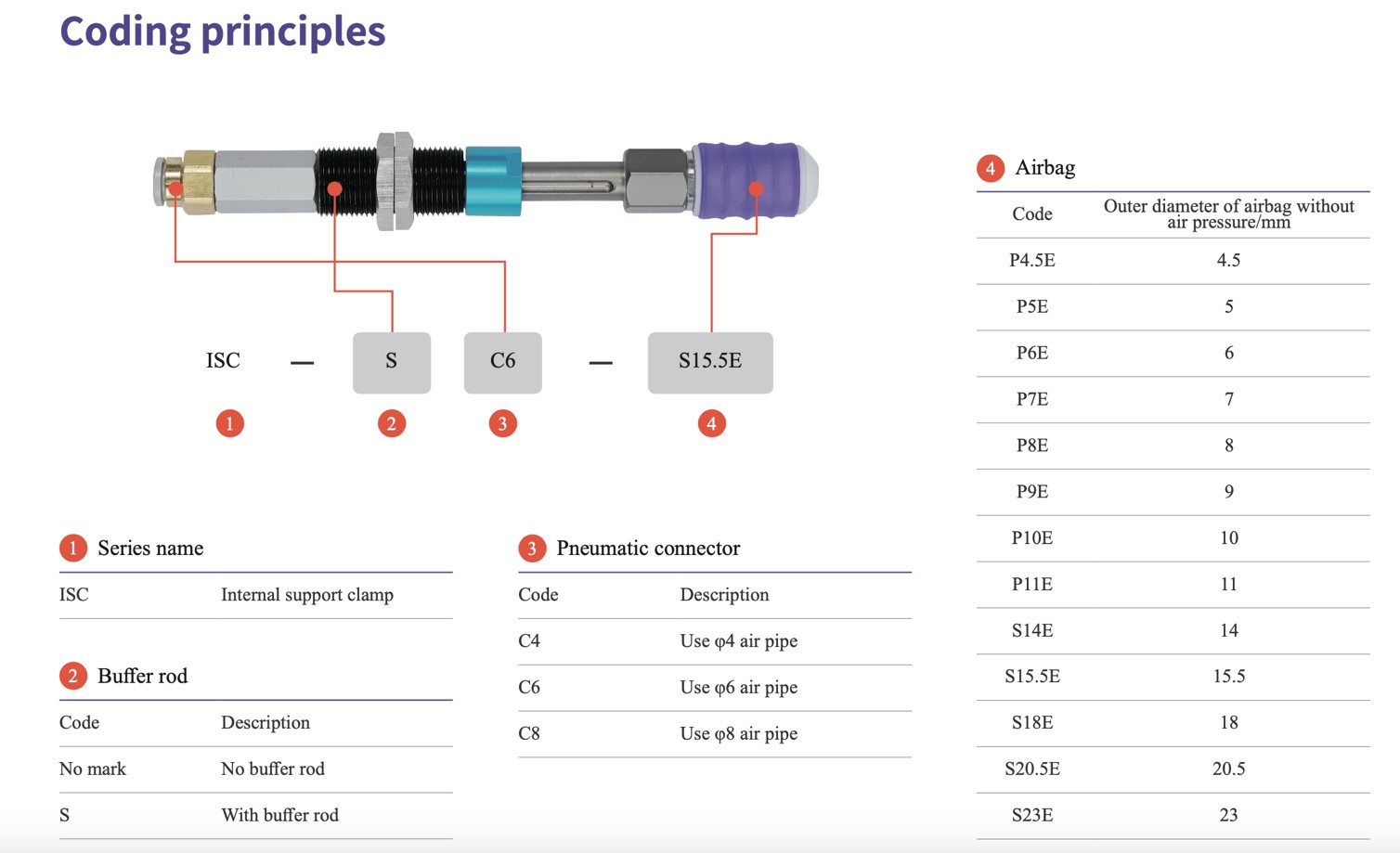
仕様パラメータ
ISCエアバッグ内部支持クランプは、フグの自己防衛形態を模倣した革新的なソフトフィクスチャーです。圧力によって空気を膨張させることで、フィクスチャーが膨張し、内部支持の把持を完了します。入力空気圧を精密に制御できるため、フィクスチャーとワークピースの把持力を制御でき、ワークピースを損傷しにくくなっています。
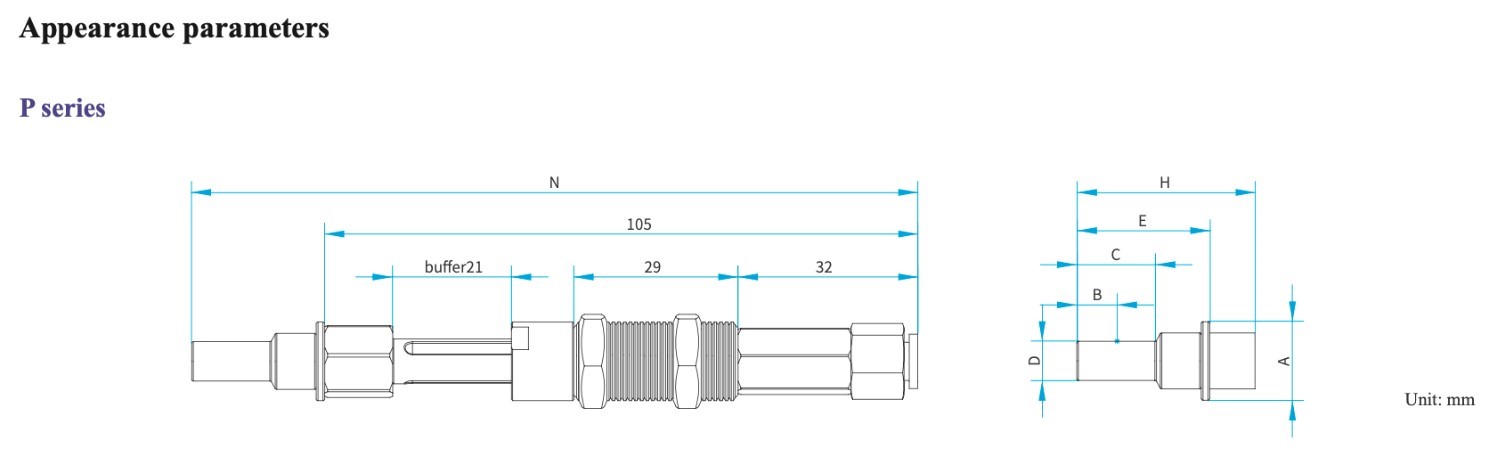
| モデル | エアバッグモジュールの全高 H | 接触面直径D | 構造部Aの直径 | 作業直径から底部Bまでの高さ | 有効接触面の高さ C | エアバッグの作動高さ モジュールE | 全長N |
| ISC-P4.5E | 25.5 | 4.5 | 14 | 4 | 8 | 17.5 | E+105 |
| ISC-P5E | 27.5 | 5 | 14 | 5 | 10 | 19.5 | E+105 |
| ISC-P6E | 30.5 | 6 | 14 | 6 | 12 | 22.5 | E+105 |
| ISC-P7E | 31.5 | 7 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P8E | 31.5 | 8 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P9E | 32.5 | 9 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P10E | 32.5 | 10 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P11E | 34.5 | 11 | 14 | 7.5 | 15 | 26.5 | E+105 |
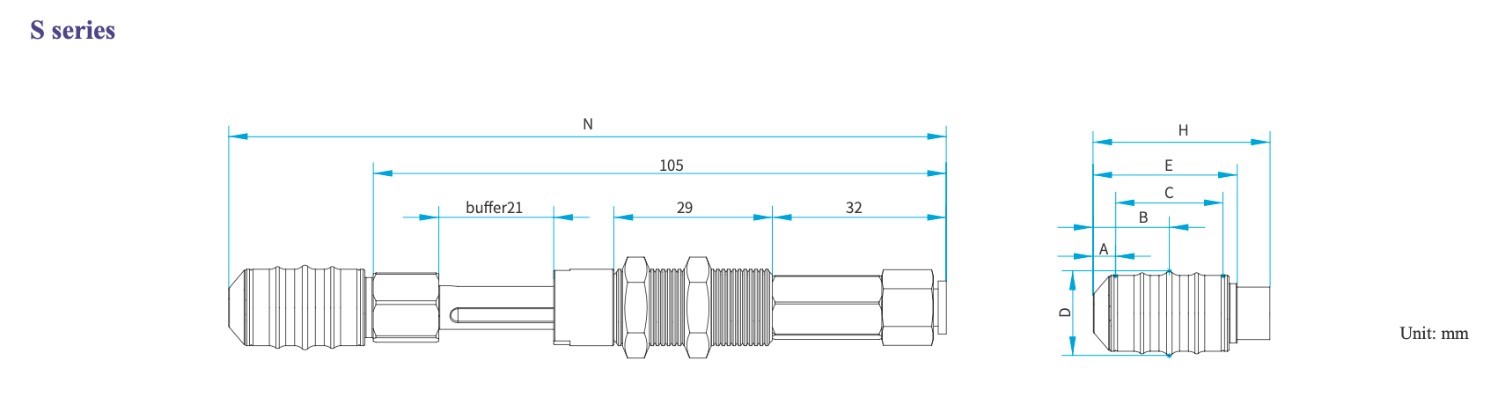
| モデル | エアバッグモジュールの全高 H | 接触面直径D | ガイド高さA | 作業直径から底部Bまでの高さ | 有効接触面の高さ C | エアバッグの作動高さ モジュールE | 全長N |
| ISC-S14E | 32.5 | 14 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S15.5E | 32.5 | 15.5 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S18E | 40.5 | 18 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S20.5E | 40.5 | 20.5 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S23E | 40.5 | 23 | 6 | 19 | 26 | 34.5 | E+105 |
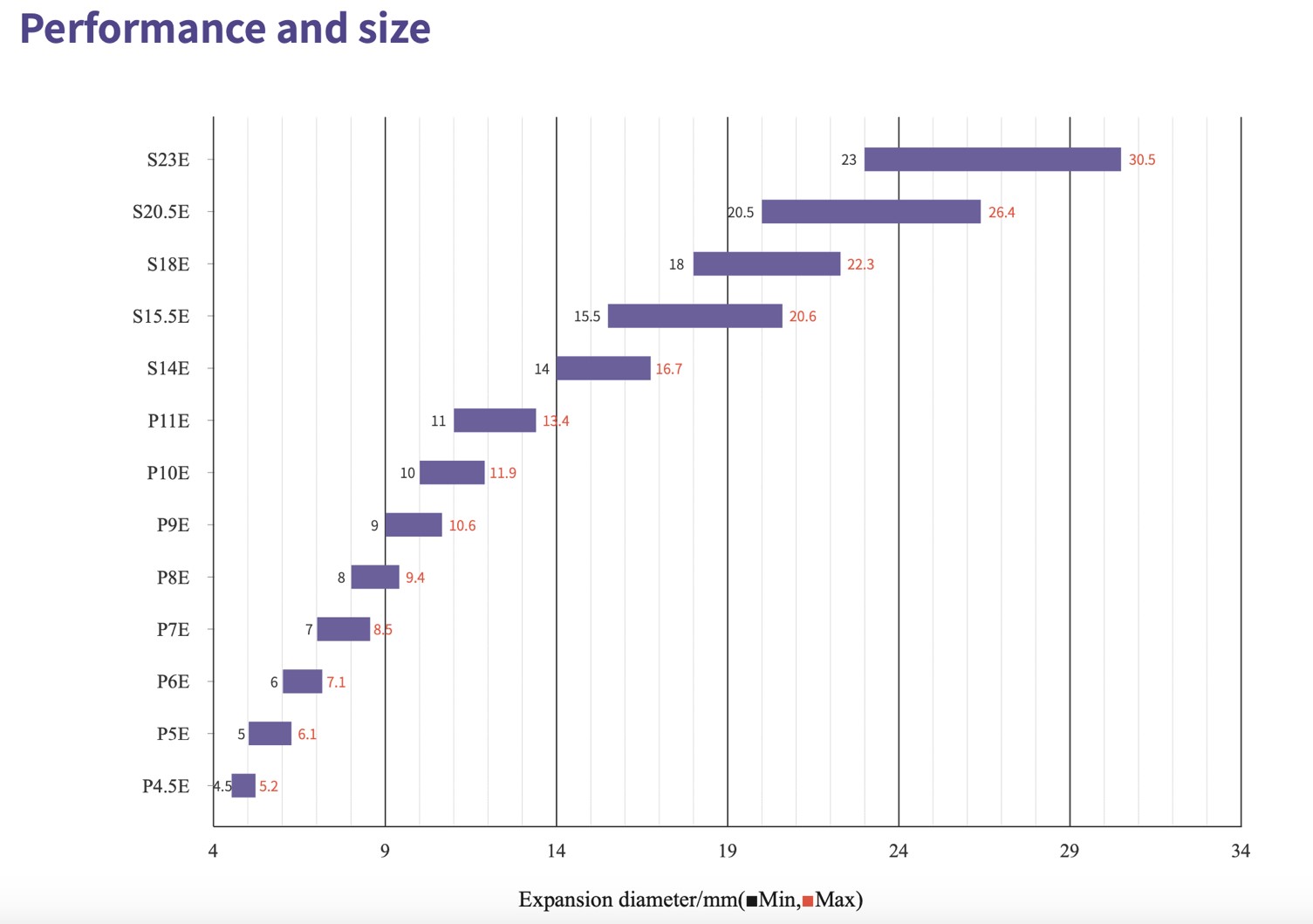
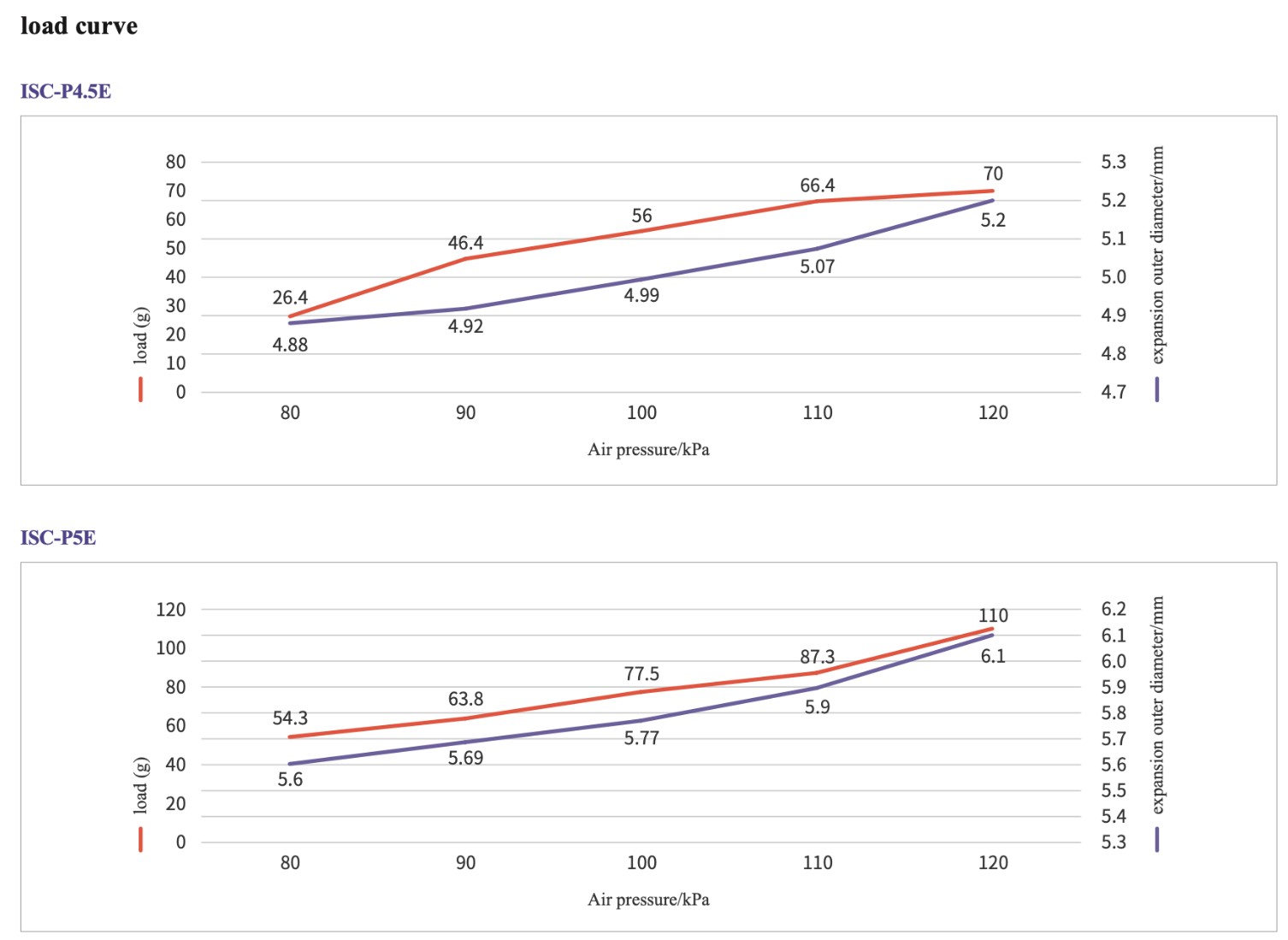
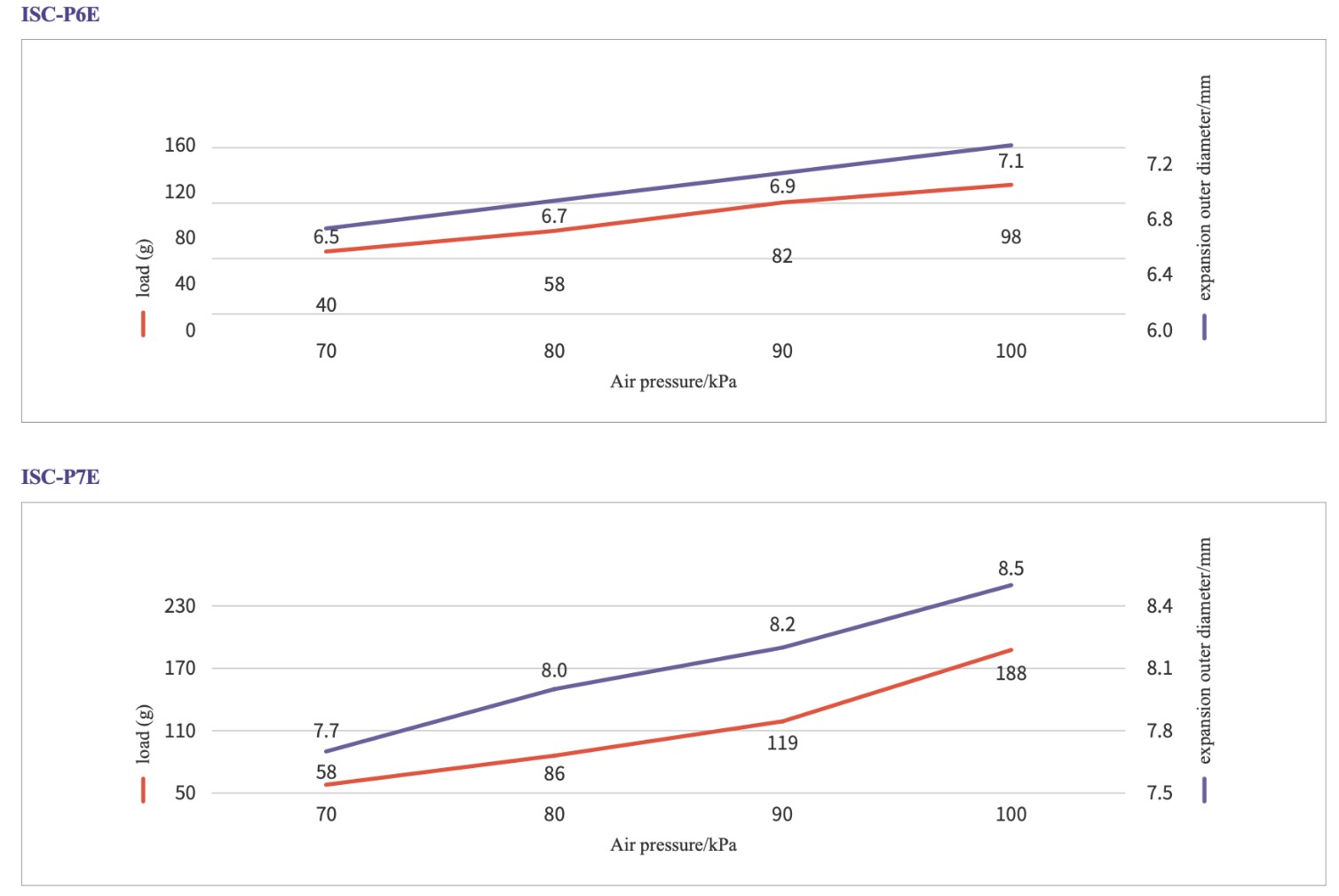
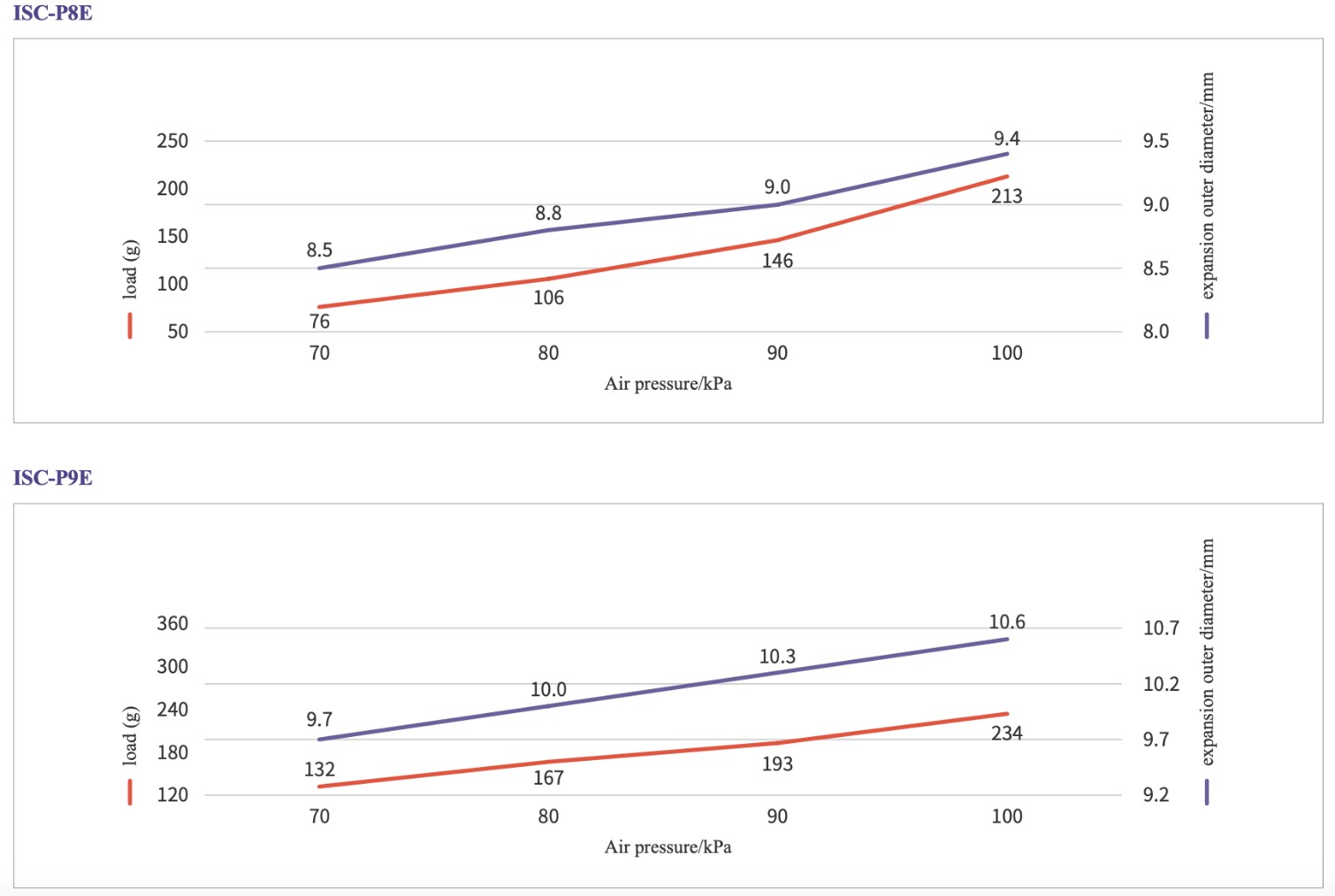
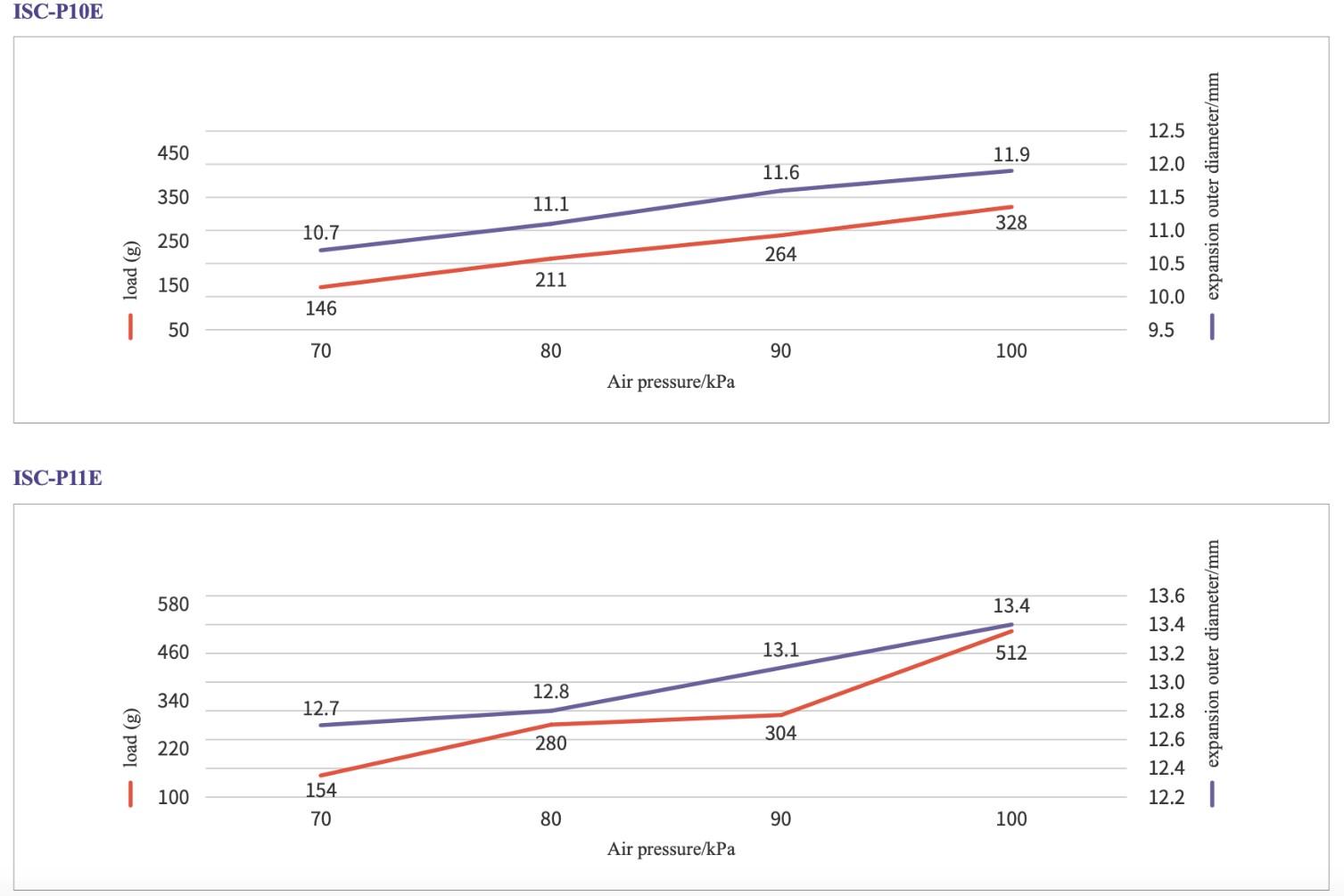
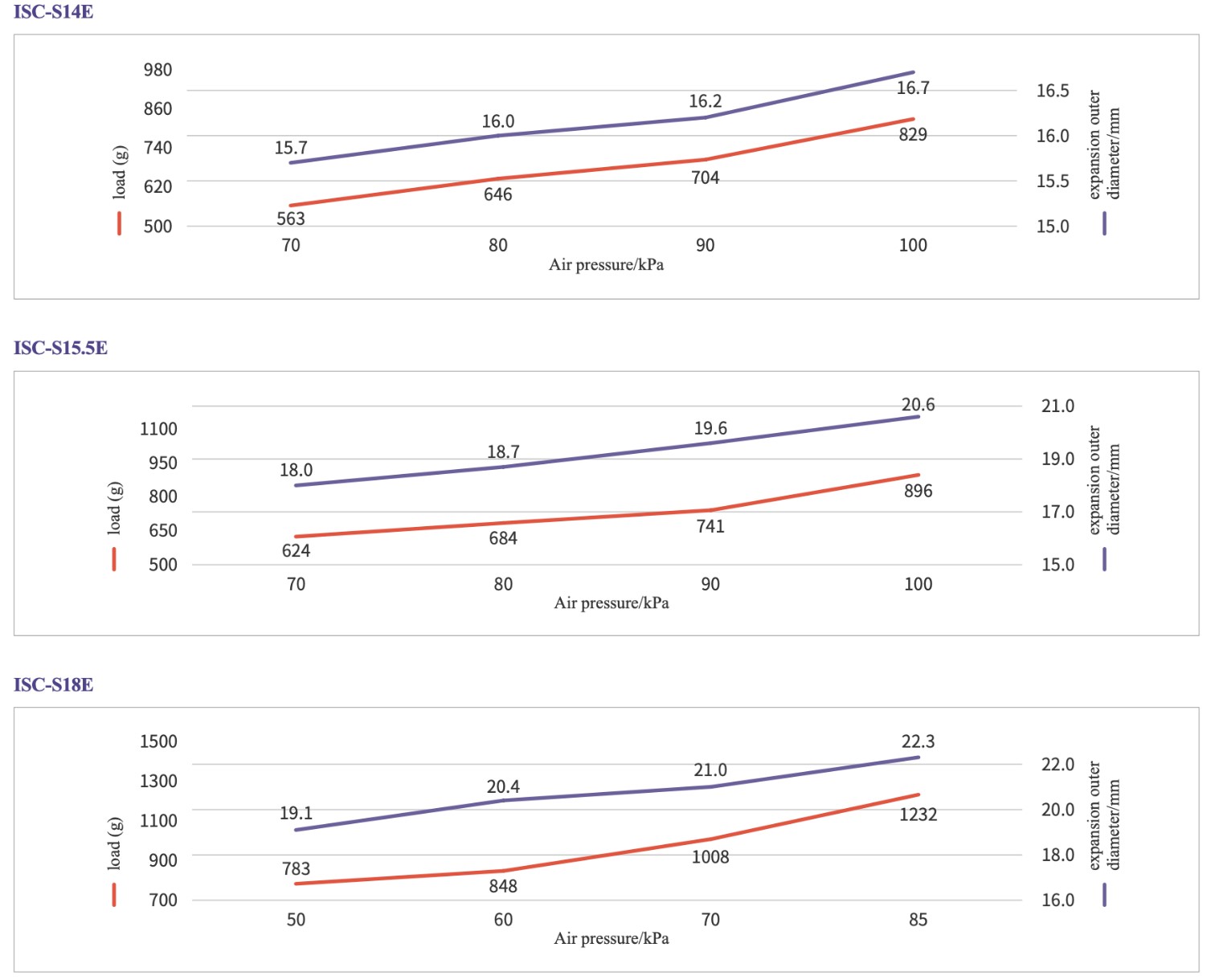
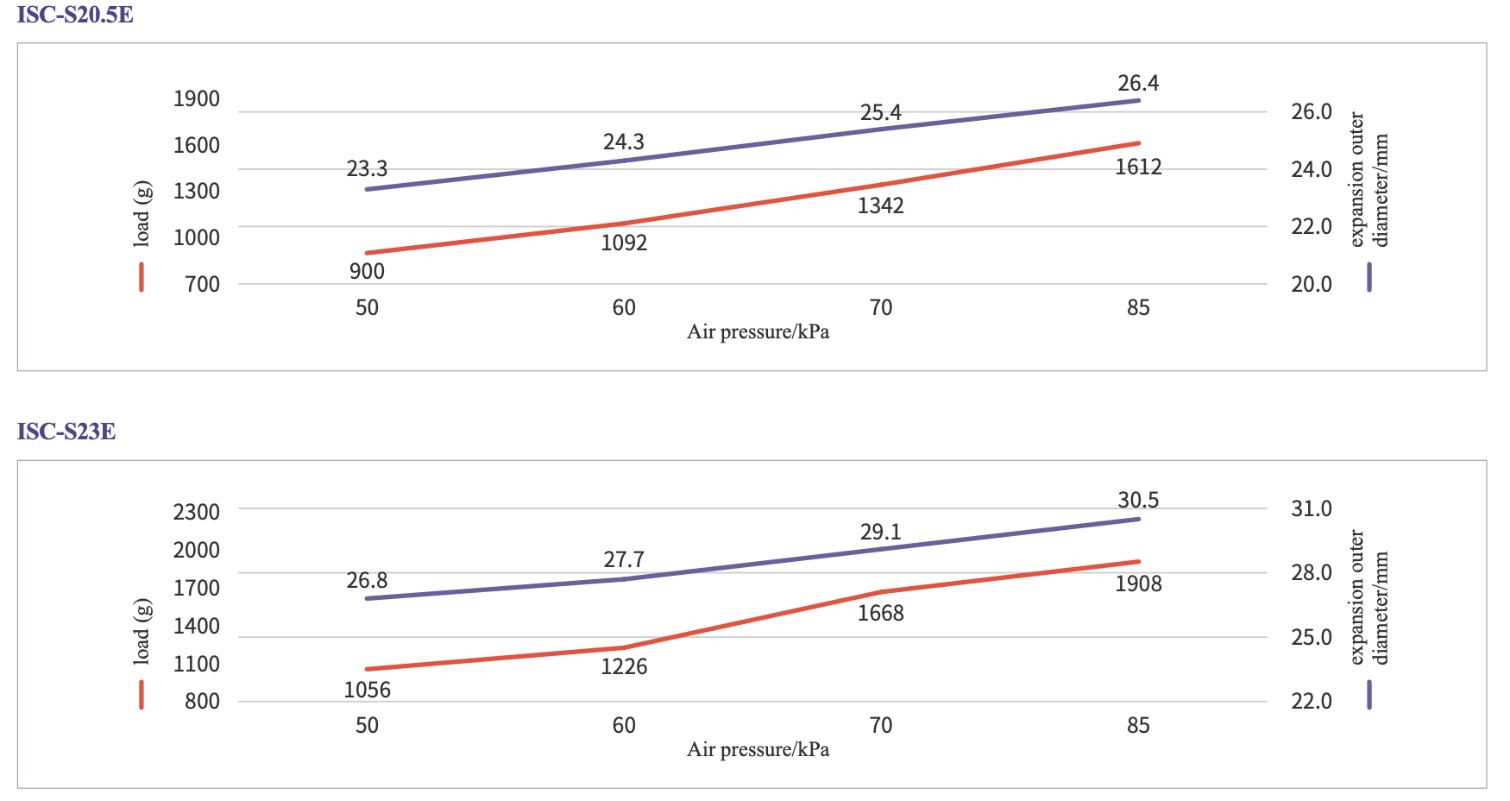
外径拡大
| モデル | 動作圧力範囲 /kPa | 最大拡張外径/mm | 最大荷重/g | 固定具重量/g | 金属棒の模型 | 取付穴寸法/mm |
| ISC-SC6-P4.5E | 0~120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P5E | 0~120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P6E | 0~100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P7E | 0~100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P8E | 0~100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P9E | 0~100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P10E | 0~100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P11E | 0~100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S14E | 0~100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S15.5E | 0~100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S23E | 0-85 | 30.5 | 1908 | 51 | VFNT 1421-G18 | 14.5 |
* Pシリーズの最大荷重試験対象はモデル外径+0.3mmです。Sシリーズの最大荷重試験対象はモデル外径+1mmです。荷重試験は専門機器で測定されます。
当社の事業







-300x2551-300x300.png)