HITBOT電動グリッパーシリーズ – Z-EFG-20 平行電動グリッパー


メインカテゴリー
産業用ロボットアーム / 協働ロボットアーム / 電動グリッパー / インテリジェントアクチュエータ / 自動化ソリューション
応用
SCIC Z-EFGシリーズのロボットグリッパーは小型で、サーボシステムを内蔵しているため、速度、位置、クランプ力の精密な制御が可能です。自動化ソリューションのためのSCICの最先端グリッピングシステムは、これまで不可能と思われていたタスクの自動化に新たな可能性をもたらします。

特徴

·内蔵コントローラー
·ストロークとグリップ力を調整可能
・先端部は交換可能で、様々なニーズに対応できます。
卵などの壊れやすく変形しやすい物を拾う試験管、指輪など
·空気源のない場所(実験室、病院など)に適用
狭いスペースでも正確に制御、クランプ可能 高速かつ安定したクランプ
大きなクランプ力
全ストロークは20mm、クランプ力は80Nです。
制御の精度
繰り返し精度: ±0.02mm
長寿命
数千万サイクル、エアグリッパーを超える
コントローラー内蔵
占有スペースが小さく、統合に便利です。
制御モード
オプションのパルス、I/Oコントローラ
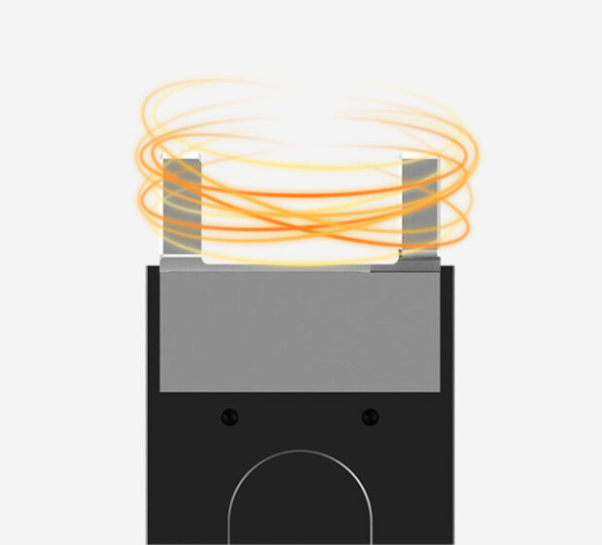
ソフトクランプ
壊れやすい物を挟むことができます




仕様パラメータ
| 型番 Z-EFG-20 | パラメータ |
| 合計 脳卒中 | 20mm |
| 把持力 | 30~80N |
| 再現性 | ±0.02mm |
| 推奨グリップ重量 | 0.8kg |
| 伝染 ; 感染 モード | ギアラック + クロスローラーガイド |
| 可動部品のグリース補充 | 6ヶ月ごとまたは100万回の移動ごと |
| 一方向ストローク動作時間 | 0.45秒 |
| 動作温度範囲 | 5~55℃ |
| 動作湿度範囲 | RH35-80(霜なし) |
| 移動モード | 2本の指を水平に動かす |
| ストロークコントロール | 調整可能 |
| クランプ力調整 | 調整可能 |
| 重さ | 0.458kg |
| 寸法(長さ*幅*高さ) | 44×30×124.7mm |
| コントローラーの配置 | 内蔵 |
| 力 | 5W |
| モータータイプ | DCブラシレス |
| ピーク電流 | 1A |
| 定格電圧 | 24V |
| スタンバイ電流 | 0.2A |
| 耐衝撃性/耐振動性 | 98メートル/秒 |
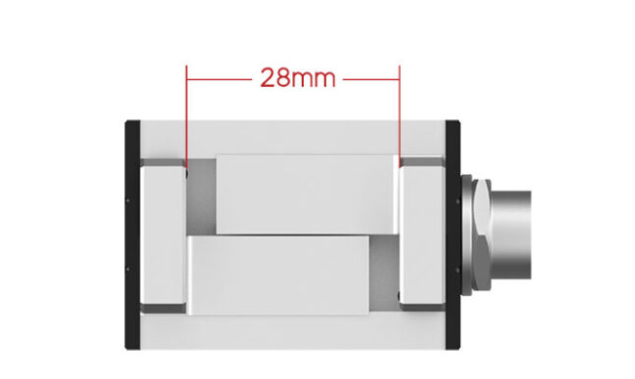
| モーター直径 | 28mm |
* Z-EFG-20 グリップ力: グリップ力は、治具の前面に変形と力の対応する曲線に従って得られる制御変形材料を追加することで調整できます。
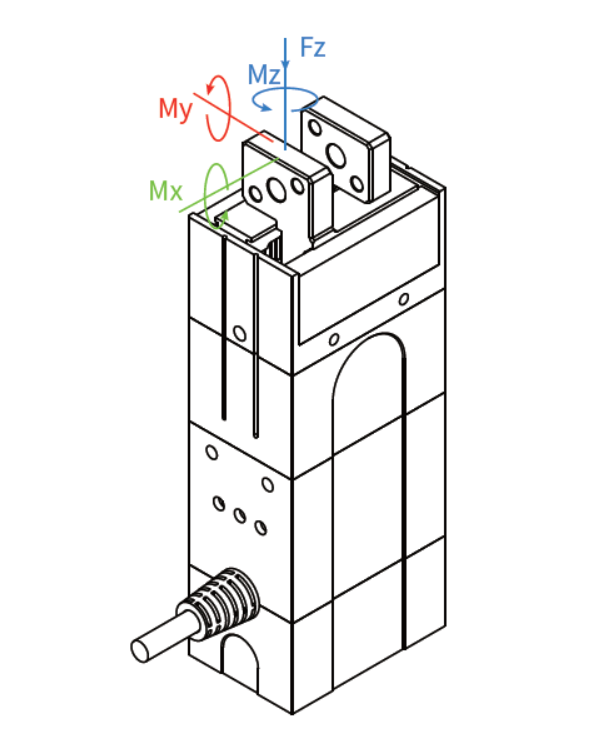
| 垂直方向の許容静荷重 | |
| Fz: | 150N |
| 許容トルク | |
| 男性: | 2.1 Nm |
| 私の: | 2.34 Nm |
| ミズ: | 2 Nm |
大きなクランプ力、正確な力制御

電動グリッパーは特殊な伝動設計と駆動計算補正を採用しており、クランプ力は80N連続調整可能、全ストロークは20mm、再現精度は±0.02mmです。
動作モードとストローク調整可能
電動グリッパーの動きは 2 本指の平行移動に属し、単一ストロークの最短時間はわずか 0.45 秒、クランプ重量は ≤0.8Kg で、生産ラインの安定したクランプの要件を満たすことができます。
コンパクトな構造、柔軟に設置可能。

Z-EFG-20 のサイズは L40*W30*H124.7mm で、構造がコンパクトで、5 つ以上の取り付けモードをサポートし、コントローラーが内蔵されており、占有スペースが小さいため、さまざまなクランプ作業を簡単に実行できます。


駆動部とコントローラを一体化したソフトクランプ

Z-EFG-20 のテールは簡単に交換でき、お客様は要求されたオブジェクトをクランプしてテールを設計し、電動グリッパーを維持してクランプ作業を最大限に完了することができます。
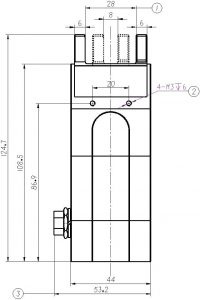
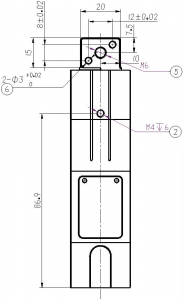
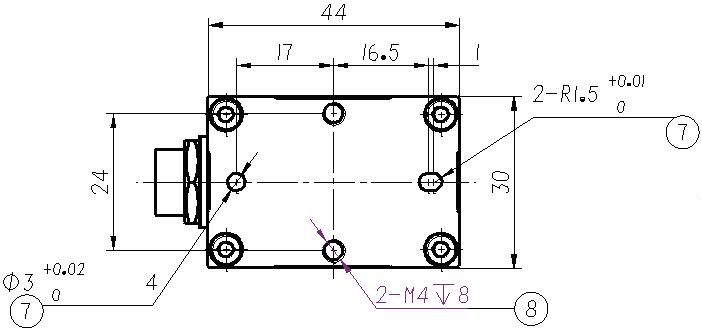
寸法図 取付図
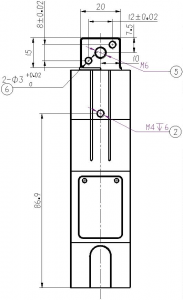
① グリッパーフィンガーの移動ストローク
②側面取付位置(ネジ穴)
③ 航空ソケット配線位置
④ グリッパー調整力の位置(左)とインジケータライト(右)
⑤ グリッパー取り付け位置(ネジ穴)
⑥ グリッパー取り付け位置(ピン穴)
⑦ 底面取り付け位置(ピン穴)
8 底面取付位置((ネジ穴)
当社の事業







