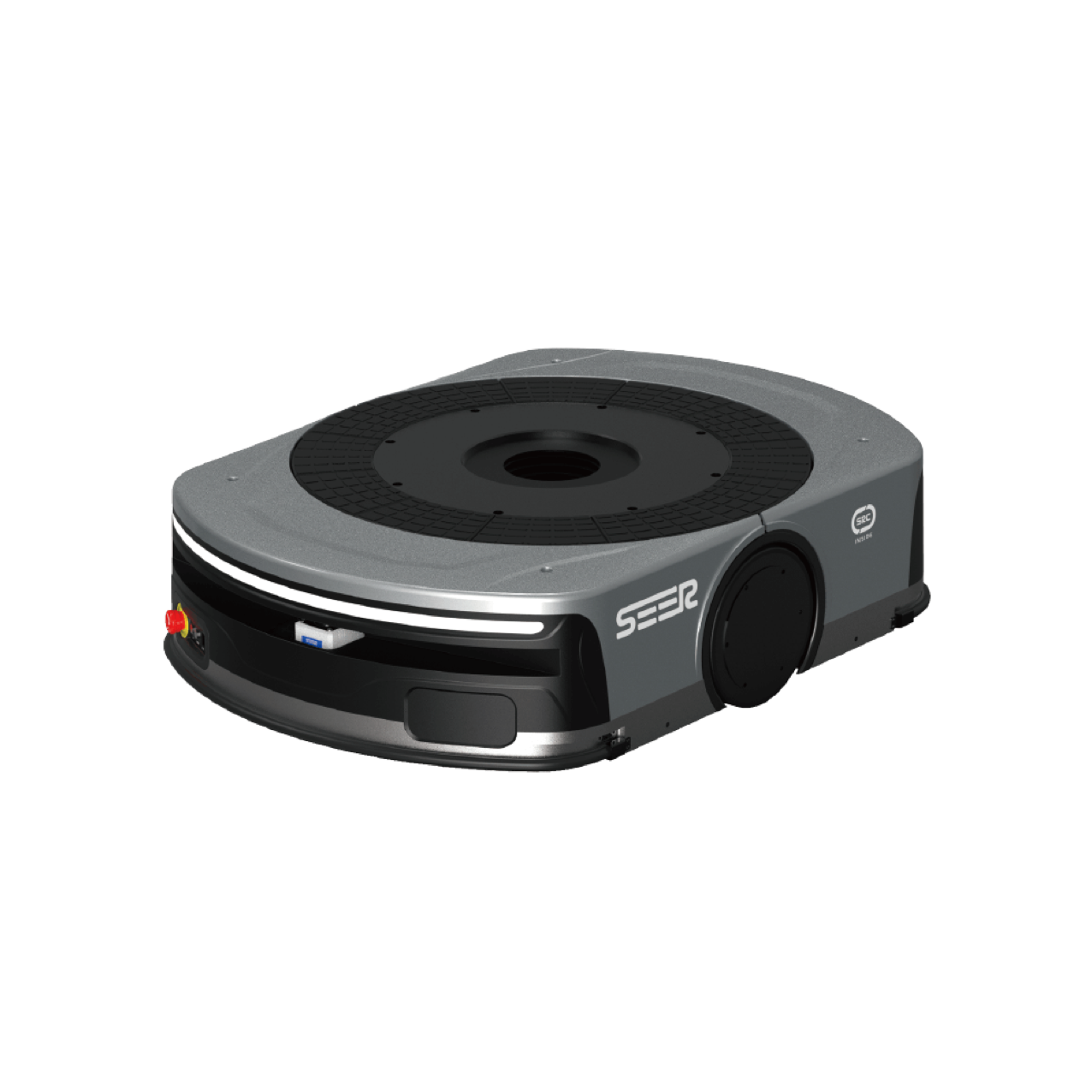
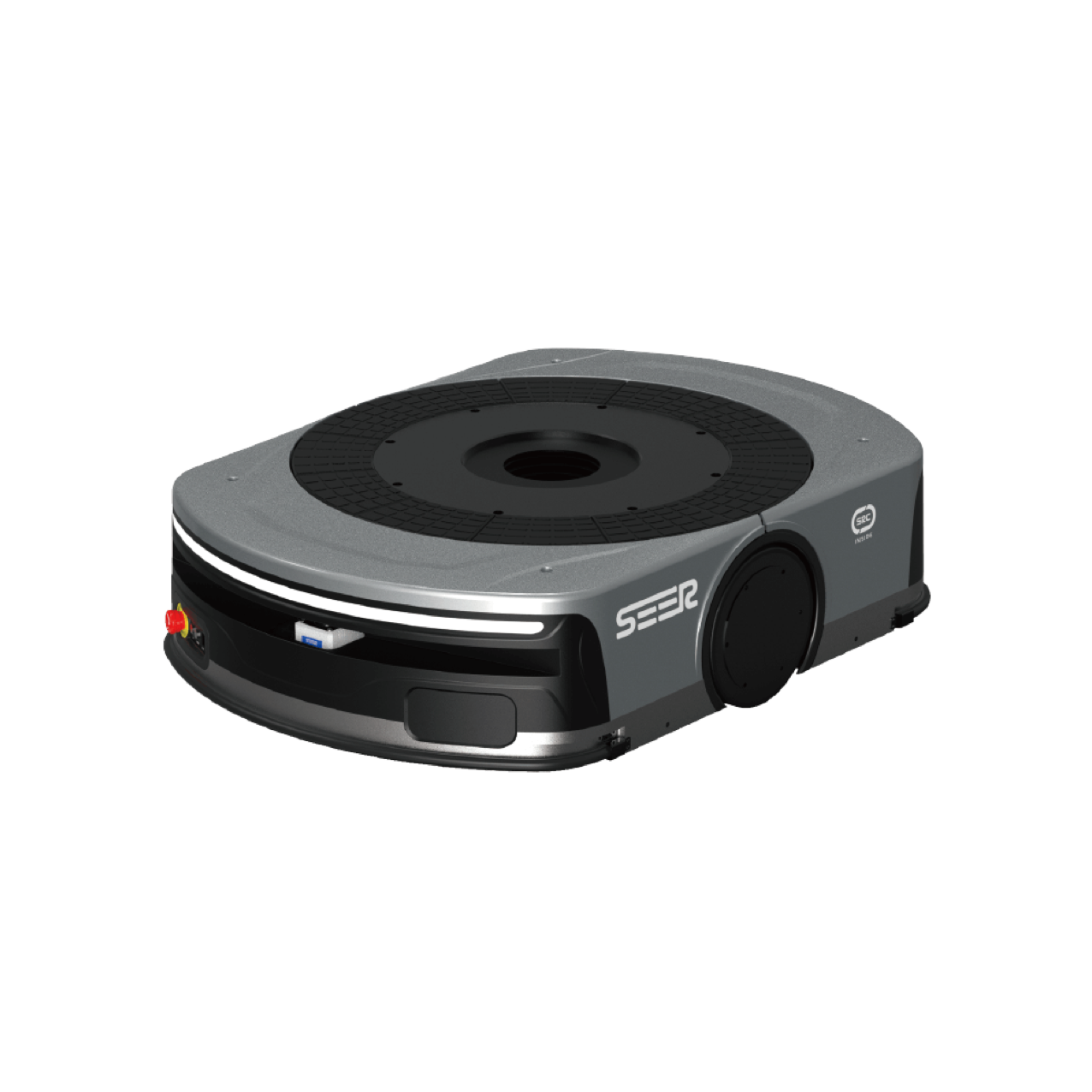
ジャッキロボット – ロータリー式リフティングロボット AMB-800K

メインカテゴリー
AGV AMR / ジャッキアップリフティング AGV AMR / AGV 無人搬送車 / AMR 自律移動ロボット / 産業用マテリアルハンドリング用 AGV AMR 車 / 中国メーカー AGV ロボット / 倉庫 AMR / AMR ジャッキアップリフティング レーザー SLAM ナビゲーション / AGV AMR 移動ロボット / AGV AMR シャーシ レーザー SLAM ナビゲーション / インテリジェント物流ロボット
応用

AMBシリーズAGV自律車両用無人シャーシAMB(Auto Mobile Base)は、AGV自律走行車用に設計された汎用シャーシで、マップ編集や位置推定ナビゲーションなどの機能を提供します。 このAGVカート用無人シャーシは、I / O、CANなど豊富な拡張インターフェースを提供し、強力なクライアントソフトウェアとディスパッチシステムとともにさまざまな上位モジュールを搭載して、ユーザーがAGV自律走行車の製造とアプリケーションを迅速に完了できるようにします。 AMBシリーズAGV自律走行車用無人シャーシの上部には4つの取り付け穴があり、ジャッキ、ローラー、マニピュレーター、潜在牽引、ディスプレイなどによる任意の拡張をサポートし、1つのシャーシで複数のアプリケーションを実現します。 AMBをSEER Enterprise Enhanced Digitalizationと組み合わせることで、数百のAMB製品を同時に統一的にディスパッチおよび展開することができ、工場内の内部物流と輸送のインテリジェントレベルが大幅に向上します。
特徴
・定格荷重:800kg
· 実行時間: 8時間
· ライダー番号: 1
・回転直径:980mm
· 航行速度:≤1.8m/s
· 位置決め精度: ±5、±0.5mm
● より薄型のボディで棚への持ち運びが可能
高さはわずか 245 mm なので、棚への運搬シナリオに最適です。
● 360°回転、ピックアップ、ドロップオフ、持ち運びに柔軟に対応
ロボット本体とジャッキアップした荷物の操縦を制御できるため、狭い空間や棚が密集した場所などでも容易に対応できます。
ナビゲーション精度は±5mmに達します。SLAM、QRコード、リフレクターナビゲーションなど、複数のナビゲーション方式をサポートし、さまざまなシナリオにおける多様な要件に対応します。
● 800kgの耐荷重で持ち運びも楽々
電子商取引のピッキング、材料の搬送、コールの配達、その他の生産など、さまざまなシナリオで荷物を運ぶための 800 kg の積載容量。
● 2.2 m/sの走行速度、より速く、より効率的
満載時の最高走行速度は1.8m/s、無負荷時の最高走行速度は2.2m/sです。2.5±0.5秒で荷物の積み降ろしが迅速に行えます。



仕様パラメータ
| 製品名 | AMB-300JZ | AMB-JS | AMB-800K | |
| アシックパラメータ | ナビゲーション方法 | レーザーSLAM | レーザーSLAM | レーザーSLAM |
| ドライブモード | 二輪車レンタル | 二輪車レンタル | 二輪車レンタル | |
| 殻の色 | クールグレー | クールグレー | 黒とグレー | |
| 長さ*幅*高さ(mm) | 792*580*250 | 1330*952*290 | 980*680*245 | |
| 回転直径(mm) | 910 | 1460 | 980 | |
| 重量(電池含む)(kg) | 150 | 265 | 150 | |
| 耐荷重(kg) | 300 | 500/1000 | 800 | |
| ジャッキプラットフォーム寸法(mm) | 760*545 | 1300*920 | φ640 | |
| 最大ジャッキアップ高さ(mm) | 60±2 | 60±1 | 60±2 | |
| パフォーマンス パラメータ | 最小通行可能幅(mm) | 640 | 1050 | 820 |
| ナビゲーション位置精度(mm)* | ±5 | ±5 | ±5 | |
| 航行角度精度(°)* | ±0.5 | ±1 | ±0.5 | |
| 航行速度(m/s) | ≤1.5 | ≤1.5 | ≤1.8 | |
| バッテリーパラメータ | バッテリー仕様(V/Ah) | 48/20(リン酸鉄リチウム) | 48/40(リン酸鉄リチウム) | 48/27(リン酸鉄リチウム) |
| 総合的なバッテリー寿命(時間) | 8 | 7 | 8 | |
| 自動充電パラメータ(V/A) | 54.6/15 | 54.6/40 | 54.5/15 | |
| 充電時間(10~80%)(時間) | ≤1 | ≤2 | ≤2 | |
| 充電方法 | 手動/自動 | 手動/自動 | 手動/自動 | |
| 構成 | ライダー番号 | 2(SICK nanoScan3+FREE C2)または2(FREE H1+FREE C2) | 2(SICKナノスキャン3) | 1(SICK nanoScan3 Core)または1(OLEILR-1BS5H) |
| 低位障害物回避光電式の数 | 0 | - | 0 | |
| 貨物検出 | - | 〇 | - | |
| 緊急停止ボタン | ● | ● | ● | |
| スピーカー | ● | ● | ● | |
| 雰囲気ライト | ● | ● | ● | |
| バンパーストリップ | ● | ● | ● | |
| 機能 | Wi-Fiローミング | ● | ● | ● |
| 自動充電 | ● | ● | ● | |
| 棚認識 | ● | ● | ● | |
| スピン | - | - | ● | |
| QRコードによる正確な位置情報 | 〇 | - | 〇 | |
| QRコードナビゲーション | 〇 | - | 〇 | |
| レーザー反射ナビゲーション | 〇 | 〇 | 〇 | |
| 認定 | EMC/ESD | - | ● | - |
| UN38.3 | - | ● | ● | |
* ナビゲーション精度は通常、ロボットがステーションまで移動する際の再現精度を指します。
● 標準 〇 オプション なし
当社の事業







